Un avance significativo en robótica médica podría transformar la forma en que se administran los medicamentos y se realizan procedimientos mínimamente invasivos. Investigadores de la Universidad Estatal de Carolina del Norte (NC State University) han desarrollado nanorobots y robots blandos inspirados en el origami, capaces de cambiar de forma y ser controlados a distancia mediante campos magnéticos o eléctricos. Esta innovación promete tratamientos más precisos y menos invasivos, marcando un hito en la atención sanitaria.
Puntos Clave
- Nanorobots de origami pueden cambiar de forma y ser controlados de forma remota.
- Permiten la administración localizada y no invasiva de fármacos.
- Utilizan materiales magnetoactivos y estructuras reconfigurables.
- Han demostrado eficacia en modelos de úlceras gástricas.
- Superan las limitaciones de rigidez de tecnologías anteriores.
Ingeniería detrás de los robots reconfigurables
La nueva generación de nanorobots médicos y robots blandos integra materiales magnetoactivos con estructuras de origami. Esto permite que dispositivos extremadamente delgados y flexibles adopten múltiples formas y funciones. Estos “metabots” se construyen a partir de láminas poliméricas con patrones de corte específicos. Pueden plegarse en cientos de configuraciones estables, lo que les confiere una versatilidad sin precedentes.
Al aplicar finas películas de materiales que responden a campos magnéticos o eléctricos, los investigadores logran que estas láminas planas se transformen en robots. Estos robots son capaces de moverse, agarrar objetos o adaptarse a diferentes entornos biológicos. La clave reside en la combinación de flexibilidad y control remoto.
Jie Yin, profesor de ingeniería mecánica y aeroespacial en NC State University, explicó que al incorporar películas delgadas que responden a la electricidad o al magnetismo en láminas poliméricas simples, estas estructuras cambian de forma de manera remota. Al conectar varias de estas láminas, se obtienen robots que pueden permanecer planos o plegarse en hasta 256 estados diferentes, lo que multiplica sus posibilidades de acción.
Dato Curioso
Los robots pueden adoptar hasta 256 configuraciones diferentes, lo que amplía enormemente su potencial de uso en diversas aplicaciones.
Materiales y mecanismos de movimiento
El funcionamiento de estos robots blandos se basa en una técnica de impresión 3D. Esta técnica permite fabricar películas magnéticas de apenas 0,8 mm de grosor. Estas películas están compuestas por elastómeros y partículas ferromagnéticas. La alta concentración de partículas magnéticas, hasta un 75% en peso, es crucial. Esto otorga a las películas una respuesta magnética potente y flexible. Xiaomeng Fang, profesora asistente en el Wilson College of Textiles, señaló que esta técnica permite imprimir una película delgada que se coloca directamente en las partes importantes del robot de origami sin reducir mucho su superficie.
El proceso de fabricación utiliza una combinación de curado por luz ultravioleta y calor. Esto consolida geometrías complejas de forma instantánea. Una vez impresas, las películas se magnetizan en la dirección deseada y se adhieren a las estructuras de origami. Al aplicar un campo magnético externo, estos “músculos” magnéticos actúan como accionadores. Provocan movimientos de rotación, contracción o desplazamiento según la orientación del campo y la configuración del robot.
Control Remoto y Versatilidad
El control remoto se realiza mediante imanes permanentes o bobinas Helmholtz. La velocidad o el tipo de movimiento se ajusta variando la intensidad y frecuencia del campo magnético. Además, la integración de materiales piezoeléctricos en las películas permite inducir vibraciones controladas mediante voltaje, ampliando aún más las opciones de movimiento y manipulación de los robots.
Aplicaciones médicas: administración no invasiva
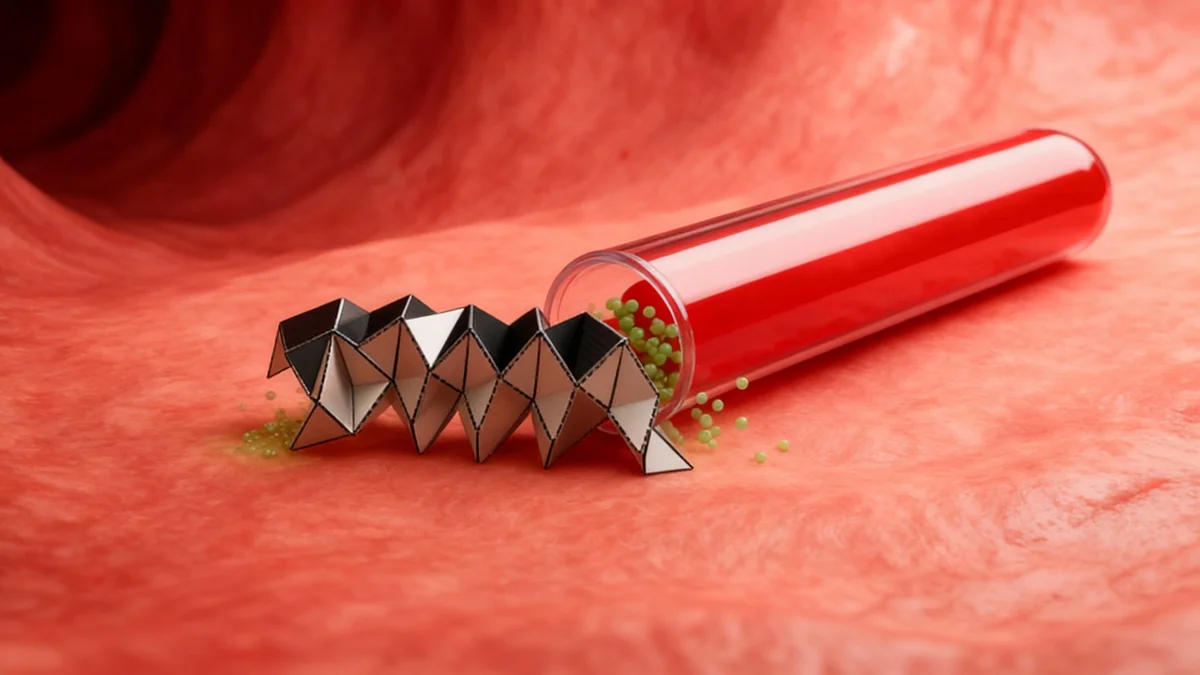
Uno de los desarrollos más prometedores es un robot de origami diseñado para la administración no invasiva de medicamentos en el tratamiento de úlceras gástricas. Este dispositivo utiliza un patrón Miura-Ori, que permite plegar una superficie amplia en un volumen compacto, facilitando su ingestión en una cápsula. Una vez en el estómago, el robot se despliega automáticamente.
Guiado por un campo magnético externo, el robot se posiciona sobre la úlcera para liberar el fármaco de manera localizada y controlada. Las pruebas se realizaron en un modelo de estómago simulado. El robot demostró su capacidad para desplegarse, navegar hasta el sitio objetivo y mantenerse fijo mediante la interacción magnética con películas externas. Este sistema permitió una liberación gradual del medicamento sin interferir con las actividades cotidianas del paciente. La biocompatibilidad de los materiales fue validada tanto in vitro como in vivo, sin observarse citotoxicidad ni reacciones inflamatorias significativas.
Un robot «crawler» para superficies irregulares
Otro ejemplo es el robot “crawler”, que emplea una doble estructura Miura-Ori para desplazarse por superficies irregulares y superar obstáculos de hasta 7 mm de altura. Su velocidad y capacidad de adaptación a diferentes terrenos, incluyendo arena, se regulan mediante el campo magnético aplicado. Esto lo convierte en una plataforma versátil para aplicaciones biomédicas y de exploración en entornos difíciles.
Ventajas y biocompatibilidad
A diferencia de los actuadores tradicionales, que suelen requerir componentes rígidos, cables o fuentes de energía externas, los robots blandos de origami funcionan de manera inalámbrica. Mantienen una alta flexibilidad y conformidad con los tejidos biológicos. La utilización de materiales magnetoactivos blandos supera las limitaciones de rigidez y tamaño de tecnologías anteriores, permitiendo una integración más segura y eficiente en dispositivos médicos.
Las pruebas de biocompatibilidad mostraron que las películas magnéticas no provocan toxicidad celular ni respuestas inmunitarias adversas. Esto respalda su potencial para aplicaciones clínicas. Además, la densidad de estos materiales es solo ligeramente superior a la del papel estándar. Esto facilita su expulsión natural del cuerpo tras cumplir su función, minimizando riesgos post-tratamiento.
Perspectivas futuras y potencial de la tecnología
El potencial de los nanorobots médicos y robots blandos de origami va más allá de la medicina. La capacidad de estos dispositivos para adoptar múltiples formas y modos de movimiento los hace aptos para tareas de manipulación delicada, exploración en entornos complejos y aplicaciones en el espacio. Ejemplos incluyen paneles solares desplegables o robots de inspección en condiciones extremas.
Jie Yin resumió el objetivo de los equipos de investigación al señalar que su meta era conectar los metamateriales y la robótica, y que los resultados obtenidos son prometedores. Por su parte, Xiaomeng Fang enfatizó la importancia de la versatilidad, subrayando que la diversidad de estructuras de origami que pueden trabajar con estos “músculos” amplía las posibilidades de resolver problemas en campos que van desde la biomedicina hasta la exploración espacial.
El desarrollo de estos robots reconfigurables y controlables a distancia representa un avance hacia sistemas médicos más precisos, seguros y adaptables. Anticipa una nueva era de dispositivos inteligentes capaces de transformar la atención sanitaria y otras áreas tecnológicas, abriendo un abanico de posibilidades para el futuro.